Vier Fahrroboter bewegen sich koordiniert im Labor
Beschreibung (Caption):
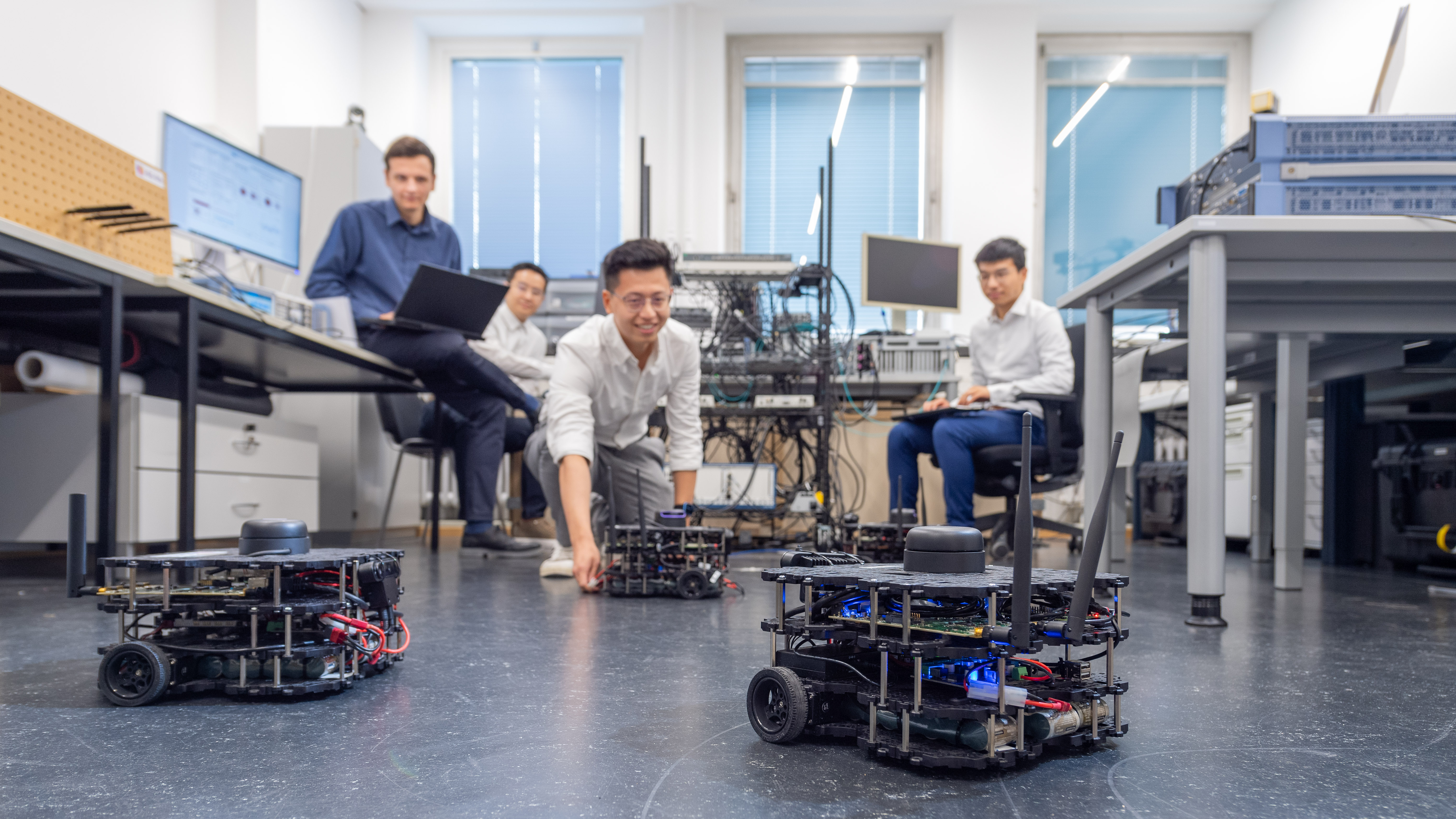
Vier Fahrroboter bewegen sich koordiniert im Labor, wobei der Einsatz eines sensing-assistierten Digitalen Zwillings die Lokalisierung der Roboter durch die Modellierung der Funkwellenausbreitung ermöglicht.
Foto: Andreas Heddergott /TUM; Verwendung frei für die Berichterstattung über die TUM bei Nennung des Copyrights /
Free for use in reporting on TUM, with the copyright noted
{kind=link}