mediaTUM
Universitätsbibliothek
Technische Universität München
Benutzer: Gast
Login
de
en
Erweiterte Suche
mediaTUM Gesamtbestand
Hochschulbibliographie
Elektronische Prüfungsarbeiten
Open Access Publikationen
Forschungsdaten
TUM.University Press
Sammlungen
Architekturmuseum - Sammlung
Agrartechnik digital
AgTecCollection - Bilder und Schriften Landtechnik
Bilder
Landtechnik - Technische Universität München
(54064)
Arbeitswirtschaft
(2877)
Bodenbearbeitungstechnik
(2885)
Energietechnik
(743)
Erntetechnik
(6812)
Fahrzeuge
(2663)
Forschung und Lehre
(562)
Forsttechnik
(70)
Gartenbautechnik
(4120)
Gebäude und bauliche Anlagen
(6469)
Informationstechnik
(2081)
Digitalisierung
(3)
Management
(12)
Normung
(337)
Ortung und Navigation
(311)
Globales Positionierungssystem (GPS)
(237)
Ortung
(67)
Navigation
(4)
Bordinstrumente
(113)
Bordcomputer
(301)
Datenerfassung
(160)
Datenverarbeitung
(329)
Dokumentation
(86)
Fütterungscomputer
(32)
Personal Digital Assistant (PDA)
Stallklimacomputer
(3)
Terminal
(53)
Elektronik
(139)
Wetterstation
(75)
Elektronische Stalltafel
(1)
Spurführungssysteme
(24)
Bildanalyse & Bildverarbeitung
(59)
Landbewirtschaftung
(1028)
Maschinentechnik
(5819)
Obstbautechnik
(379)
Ökonomie
(1055)
Pflanzenanbautechnik
(9037)
Pflanzenschutztechnik
(597)
Tierhaltungstechnik
(7200)
Umwelttechnik
(355)
Weinbautechnik
(172)
Agrartechnik - Humboldt Universität Berlin
(5232)
Schriften
Filme & Videos
Forschungsdaten
Lehrstuhl für Agrarsystemtechnik
Lehrstuhl für Agrarmechatronik
ATB-Collection
Bild-Sammlungen
Projekte
Einrichtungen
mediaTUM Gesamtbestand
Sammlungen
Agrartechnik digital
AgTecCollection - Bilder und Schriften Landtechnik
Bilder
Landtechnik - Technische Universität München
Informationstechnik
Ortung und Navigation
Navigation
Zurück
Zurück zum Anfang der Trefferliste
Dauerhafter Link zum angezeigten Objekt
Verfügbare Bildformate
image/png (5.8 MB)
Dokumenttyp:
Schemazeichnung
Titel:
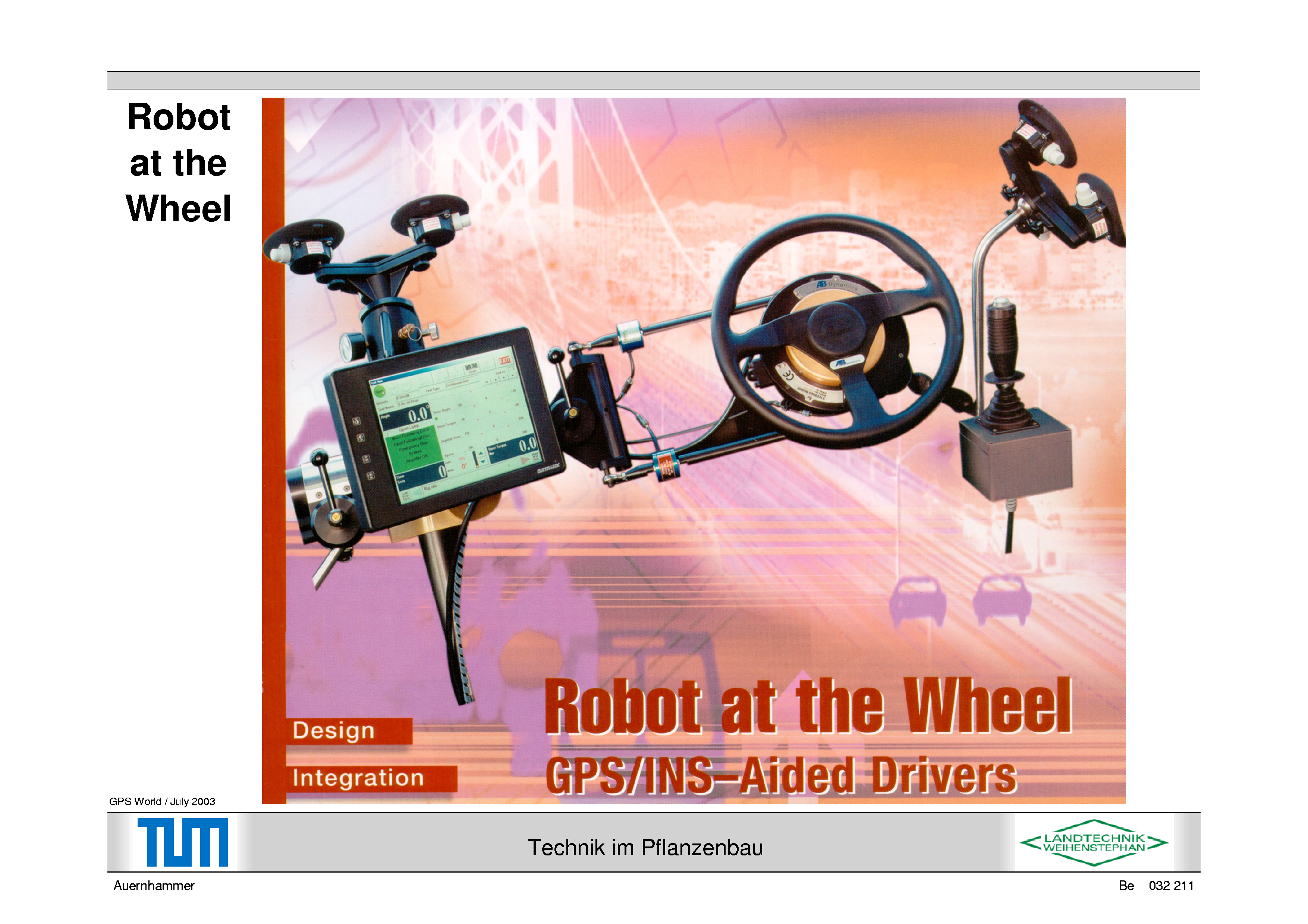
Robot at the Wheel
Schlagworte:
Informationstechnik; Precision Farming; Globales Positionierungssystem (GNSS); Navigation; Robotik; Spurführungssystem
Schlagworte (engl.):
Information technology; Precision Farming; Global Navigation Satellite System (GNSS); Navigation; Robotics; Guidance system
Autor/en:
Auernhammer, H.
Jahr:
2003
Genaues Erstellungsdatum:
01.08.2003
Sprache:
de
Farbe:
farbig
Zeichner:
Berchtold, M.
Herkunft:
Institut für Landtechnik TUM / Zeichenbüro
Zitation:
http://mediatum.ub.tum.de/export/1574107/citation
Vorkommen:
mediaTUM Gesamtbestand
Sammlungen
Agrartechnik digital
AgTecCollection - Bilder und Schriften Landtechnik
Bilder
Landtechnik - Technische Universität München
Informationstechnik
Ortung und Navigation
Navigation
mediaTUM Gesamtbestand
Sammlungen
Agrartechnik digital
AgTecCollection - Bilder und Schriften Landtechnik
Bilder
Landtechnik - Technische Universität München
Informationstechnik
Spurführungssysteme
{kind=link}