- Dokumenttyp:
- Schemazeichnung
- Titel:
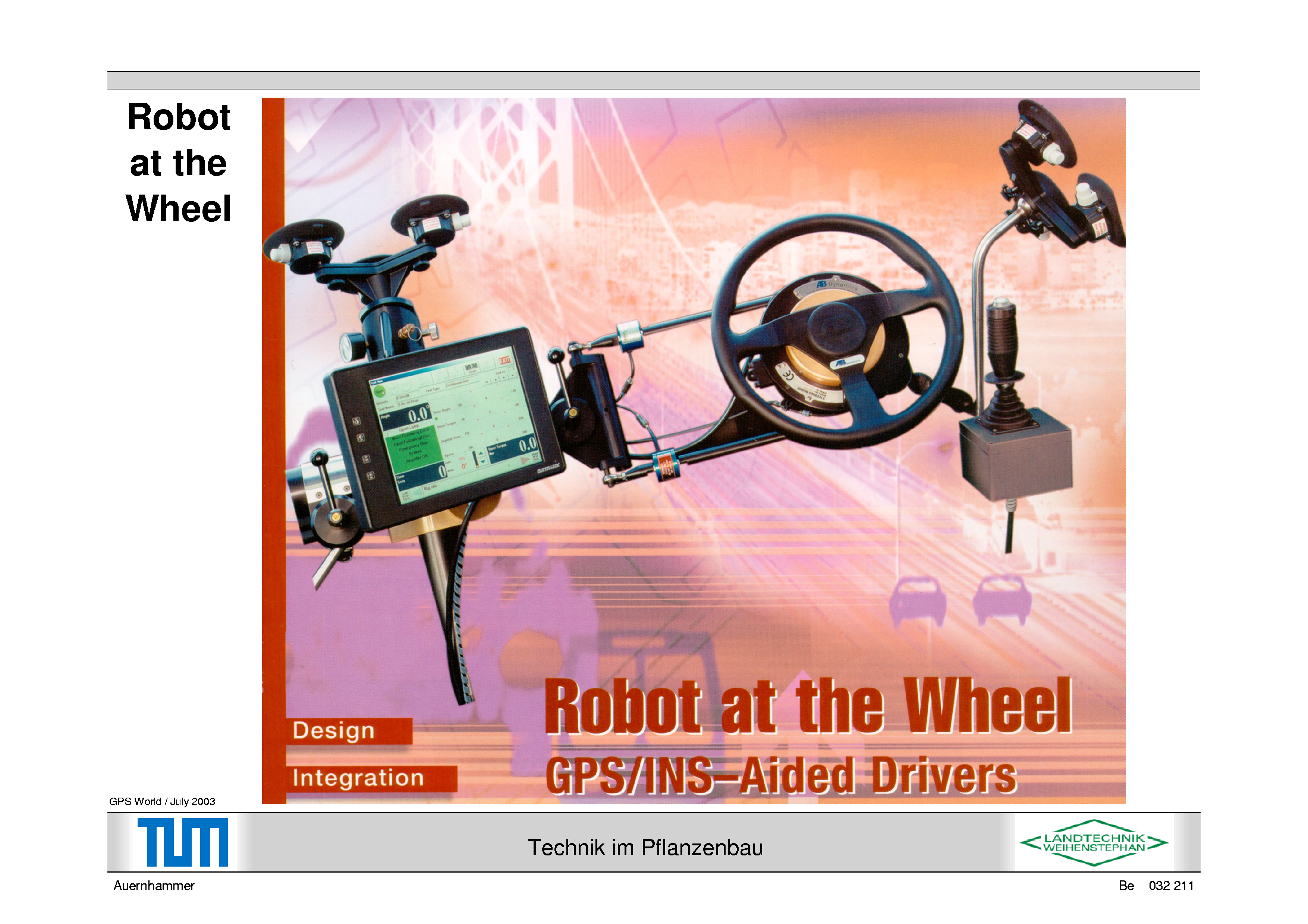
- Robot at the Wheel
- Schlagworte:
- Informationstechnik; Precision Farming; Globales Positionierungssystem (GNSS); Navigation; Robotik; Spurführungssystem
- Schlagworte (engl.):
- Information technology; Precision Farming; Global Navigation Satellite System (GNSS); Navigation; Robotics; Guidance system
- Autor/en:
- Auernhammer, H.
- Jahr:
- 2003
- Genaues Erstellungsdatum:
- 01.08.2003
- Sprache:
- de
- Farbe:
- farbig
- Zeichner:
- Berchtold, M.
- Herkunft:
- Institut für Landtechnik TUM / Zeichenbüro
- Zitation:
- http://mediatum.ub.tum.de/export/1574107/citation
{kind=link}