- Dokumenttyp:
- Schemazeichnung
- Titel:
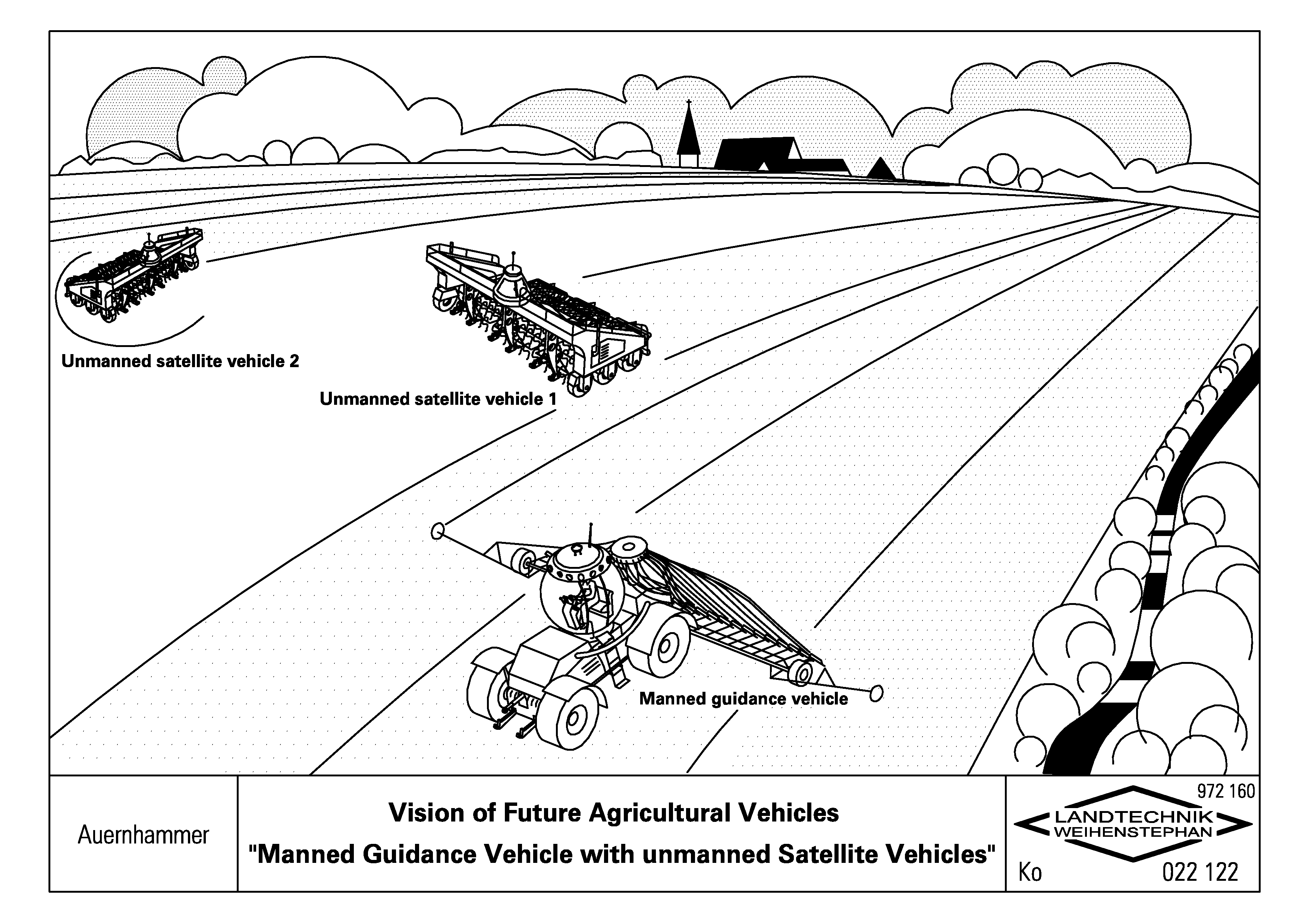
- Vision of Future Agricultural Vehicles "Manned Guidance Vehicle with unmanned Satellite Vehicles"
- Schlagworte:
- Landbewirtschaftung; Traktorkonzept; Feldrobotik
- Schlagworte (engl.):
- Land administration; Tractor concept; Field robotics
- Autor/en:
- Auernhammer, H.
- Jahr:
- 2002
- Genaues Erstellungsdatum:
- 25.04.2002
- Sprache:
- en
- Farbe:
- schwarzweiß
- Hinweise:
- dwg File in Attachment
- Zeichner:
- Kolbinger, S.
- Herkunft:
- Institut für Landtechnik TUM / Zeichenbüro
- Link:
- PA-Book 2015
- Quelle - Titel:
- Precision Agriculture Technology for Crop Farming - State of the Art and Future Requirements
- Quelle - Autor:
- Auernhammer, H.; Demmel, M.
- Quelle - Jahr:
- 2015
- Quelle - Seite:
- 335
- Erfassungsjahr:
- 2009
- Zitation:
- http://mediatum.ub.tum.de/export/733693/citation
{kind=link}