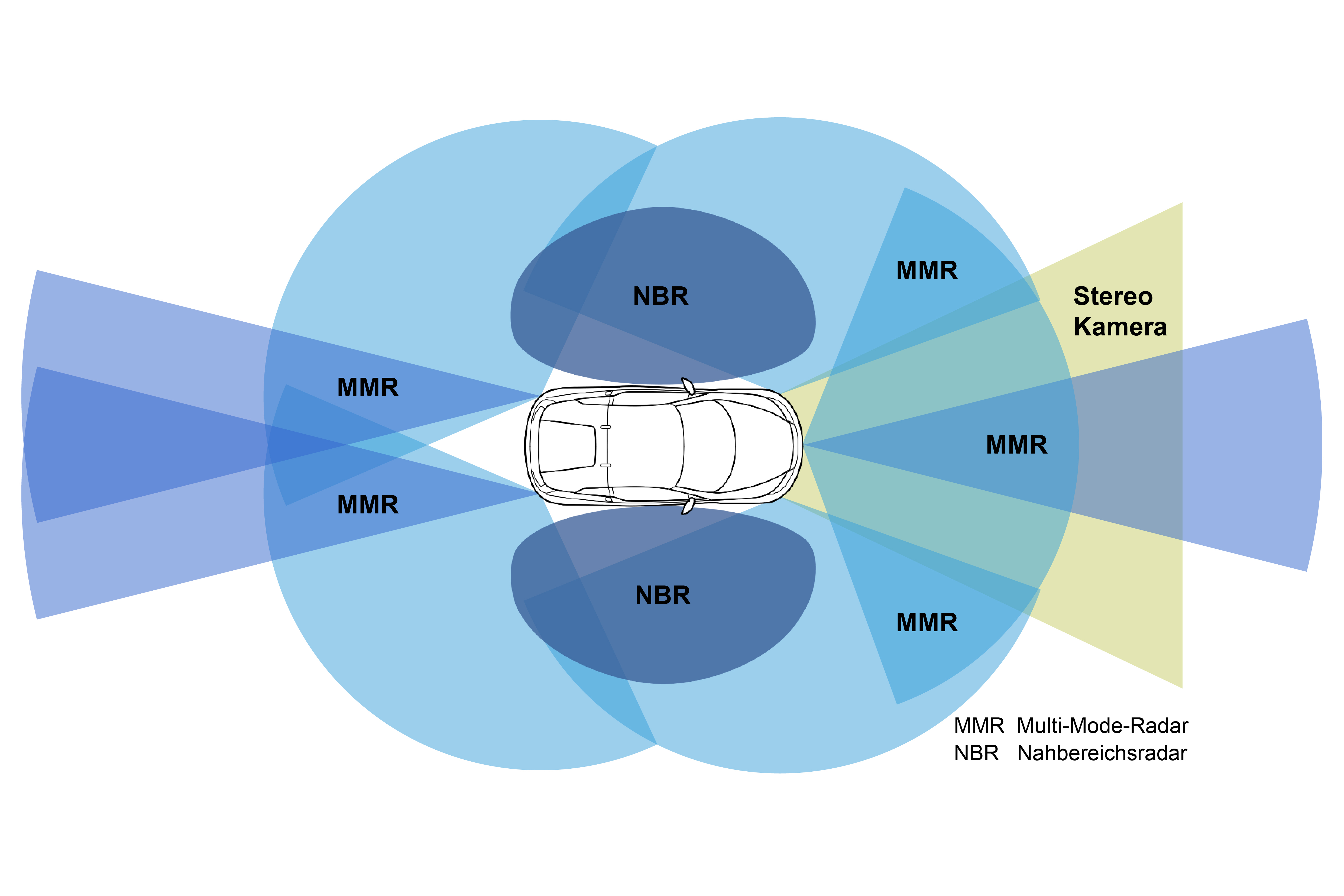
Durch eine 360°-Erfassung der unmittelbaren Fahrzeugumgebung mittels Radar- und Kamerasensoren ist es möglich, frühzeitig kritische Fahrsituationen zu erkennen. Diese Informationen werden nicht nur für Fahrerassistenz und Warnung genutzt. Erkennt das Fahrzeug eine nicht mehr vermeidbare Kollision, aktiviert es eingebaute Insassenschutzsysteme schon vor dem eigentlichen Crash.
Ereignis / Anlass:
Präsentation des Visio.M auf der eCarTec
Schlagworte:
Auto; Elektromobilität; E-Mobilität; E-Fahrzeug; Elektrofahrzeug; Elektroauto; Visio.M; eCarTec; Fahrzeugkonzept; Leichtbauweise; Effizienz; Sicherheit; Industrie; BMBF; Bundesministerium für Bildung und Forschung
Fakultät:
Maschinenwesen
Forschungseinrichtung:
Lehrstuhl für Fahrzeugtechnik
Wissenschaftsgebiet:
Ingenieurwissenschaften
TUM Standort:
Garching
Aufnahmezeitpunkt:
2014
Dokumenttyp:
Foto
Herkunft:
extern
Urheber Bild / Fotograf:
IAV GmbH; Autoliv B. V. & Co. KG; Rauchbart, Simon/TUM
Nutzungsrecht:
rei für Berichterstattung über Visio.M-Projekt - jede andere Verwendung bedarf der vorherigen Genehmigung
{kind=link}